


























電子速度制御装置(ESC)は、電気モーターの速度と方向を制御する電子回路です。
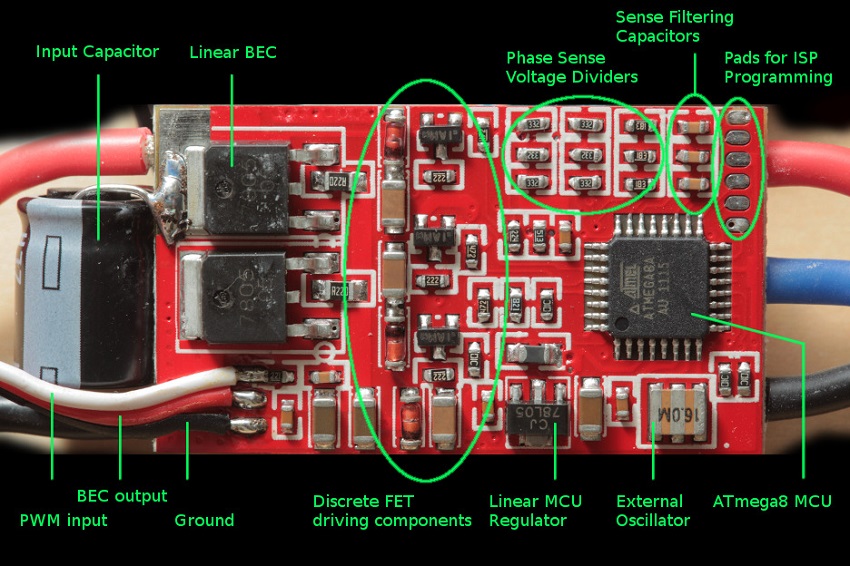
ESCがブラシ付きモーター用であるかブラシレス用であるかにかかわらず、ESCは制御情報を解釈します。これは、サーボユニットの場合のような機械的な動きではなく、「電界効果トランジスタ」またはより一般的にはFETとして知られているネットワークのスイッチングレートを変化させる方法です。これらのトランジスタの急速なスイッチングは、モーター自体がその特徴的な高音を発する原因となります。これは、低速で特に顕著です。これらのFETはまた、モーターのはるかにスムーズで正確な速度制御を可能にし、古い機械式の速度コントローラーよりもはるかに効率的な方法で、多くのモデルで見られた抵抗コイルと可動アームを備えています、特にモデルカー部門では、数年前です。最新のブラシ付きおよびブラシレスESCには、「バッテリーエリミネーター回路」(BEC)が組み込まれており、レシーバーとサーボを実行するための安定した電圧を調整します。これにより、モデルに予備のバッテリーを搭載する必要がなくなります。 BECは通常、「リニア」または「スイッチモード」のいずれかです。
リニアBEC
リニアBECは、Lipoパックで通常使用する7.4v〜11.1vから、レシーバーに必要な5ボルトに電圧を下げることで機能します。リポ電圧が高く、RXが消費する電力が多いほど、より多くの熱が発生します。電流がこの抵抗器を流れるときに。電流が多すぎると、電子スピードコントローラーまたはBECが過熱して損傷します。言うまでもなく、特に大型の電気飛行機では、多くの電力を浪費します。
切り替えられたBEC
スイッチドBECは、電圧のオンとオフをすばやく切り替えることにより、熱を発生させたり電力を浪費したりすることなく、効果的に電圧を下げます。一部のSwitchedBECでは、飛行する航空機の方法と種類に応じて、受信機に5vと6vのどちらを供給するかを選択することもできます。この電圧のオンとオフの切り替えは、過去に一部の無線機器との干渉を引き起こすことが知られていましたが、このタイプの干渉は、最近のほとんどの2.4GHzの装備でほぼ解消されています。一般的な経験則として、liPoバッテリーに4つ以上のセルがあり、高い電力需要が必要な場合は、スイッチドBECを使用するのが最適です。広義のESCは、電気モーター用のパルス幅変調(PWM)コントローラーです。レシーバーは、1msから2msまで変化する50Hz PWM信号をESCに出力します。1msではモーターは静止し、1.5msではモーターが静止します。は半分の速度で動作し、2msでは全速力で動作します。もちろん、これらの数値の間でスムーズな速度制御が得られます。ブラシ付きモーターのESCは、ブラシレスモーターのESCとは大きく異なり、互換性がありません。ブラッシュドESCには2本のモーターワイヤーがあり、ブラッシュレスESCには3本のモーターワイヤーがあるため、ブラシレスモーター付きのブラシレスESCとブラッシュドモーター付きのブラッシュドESCを使用する必要があります。
ブラシ付きモーターの制御

ご存知かもしれませんが、ブラシ付きモーターは、電圧が印加されている限り、多かれ少なかれ機械的に動作します。 モーターが回転する速度を制御するために、ブラシをかけられたESCは単に電圧をオン/オフします。これは非常に迅速に、1秒間に何回も行われます。 モーターの速度を上げるために、ESCは単に電圧がオンになる時間を増やし、電圧がオフになる時間を減らします。 モーターを遅くするには、プロセスを逆にします。 ブラシ付きESCとブラシレスESCの違いを理解する上で重要な点は、ブラシ付きESCは、ブラシ付きモーターアーマチュアなどの位置を気にしないことです。前述のように、電圧をオン/オフするだけです。
ブラシレスモーターの制御
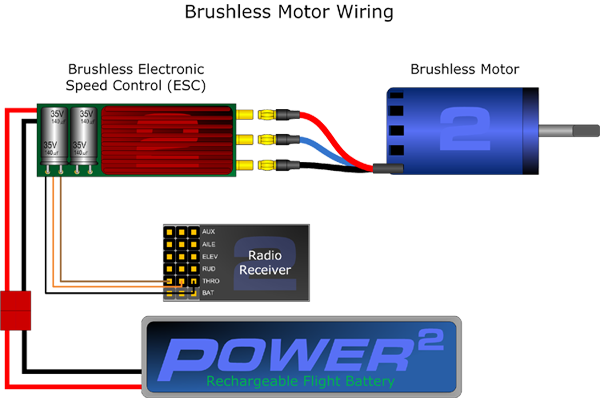
ブラシレスモーターの動作はまったく異なるため、それらの制御はまったく異なるプロセスです。ブラシがないと、ESCはコイル/ステーターの位置を認識できません。各極にいつ通電するかを正確に決定するには、モーターからの何らかのフィードバックが必要です。ブラシレスESCは、基本的に「DC電源からの3相AC電源出力を作成し、ESCの回路から生成された一連のAC信号を送信してモーターを実行します。ここで、3本のワイヤーが入り、2本のワイヤーだけが通電されます。特定の瞬間に通電されていない極は、モーターの回転速度に比例した少量の電圧を生成します。これは「逆起電力」(逆起電力)として知られています。この小さな電圧は、ESCが任意の時点でモーターがどのくらいの速さでどの方向に回転しているかを判断するために使用されます。この情報により、ESCは電磁石に電力を送り、モーターを回転させ続ける方法を認識します。この位置の検出モーターの動作は、磁気「ホール効果」センサーまたは「光学」検出器を使用して実現することもできます。これらは、モデルカーのESCおよびインランナーブラシレスモーターでより一般的に見られます。アウトランナーモーターは通常、「バック」で制御されます。 EMF」スタイルのコントローラー。
コンピューターでプログラム可能な速度コントローラーには、一般に、低電圧のカットオフ制限、タイミング、加速、ブレーキ、回転方向などを設定できるユーザー指定のオプションがあります。モーターの方向を逆にすることは、3本のリード線のうちの任意の2本をESCからモーターに切り替えることによっても達成できます。
電子スピードコントローラーの選択
ESCは、処理できる最大電流に対して定格が定められています。 ESCの定格が最新であるほど、ESCはより高価で、より重くなります。モーターとプロペラの組み合わせがフルスロットルで引く速度よりもわずかに高い定格の電子速度コントローラーを選択してください。電流が多すぎると、電子スピードコントローラーがすぐに損傷します。一方、ESCが大きすぎると、飛行機の性能に悪影響を与える自重であり、より高価であり、必要ではありません。セルの電圧が3.0ボルトを下回ると、LiPoバッテリーは恒久的に損傷します。このため、LiPoバッテリーには、低電圧カットオフ(LVC)を備えた電子速度コントローラーが必要です。 LVCは、電圧が3.2Vに達するか、カットオフを事前にプログラムしたものであれば、モーターへの電力をカットします。また、使用する予定のバッテリーパックの電圧を処理できるESCを選択する必要があります。各ESCの電圧定格は、仕様に明確に記載されています。
概要
これは、Electronic Speed Controllerがどのように機能するかについての、技術的な洞察ではありません。これを読んで楽しんでいただき、実際にどのように機能するかについてもう少し理解していただければ幸いです。







